Serial C example problems
ark_analytic
This is a very simple C example showing how to use the ARKODE solver interface.
The problem is that of a scalar-valued initial value problem (IVP) that is linear in the dependent variable \(y\), but nonlinear in the independent variable \(t\):
where \(0\le t\le 10\) and \(y(0)=0\). The stiffness of the problem may be tuned via the parameter \(\lambda\). The value of \(\lambda\) must be negative to result in a well-posed problem; for values with magnitude larger than 100 or so the problem becomes quite stiff. Here, we choose \(\lambda=-100\). After each unit time interval, the solution is output to the screen.
Numerical method
The example routine solves this problem using a diagonally-implicit Runge-Kutta method. Each stage is solved using the built-in modified Newton iteration, but since the ODE is linear in \(y\) these should only require a single iteration per stage. Internally, Newton will use the SUNLINSOL_DENSE linear solver via the ARKDLS interface, which in the case of this scalar-valued problem is just division. The example file contains functions to evaluate both \(f(t,y)\) and \(J(t,y)=\lambda\).
We specify the relative and absolute tolerances, \(rtol=10^{-6}\) and \(atol=10^{-10}\), respectively. Aside from these choices, this problem uses only the default ARKODE solver parameters.
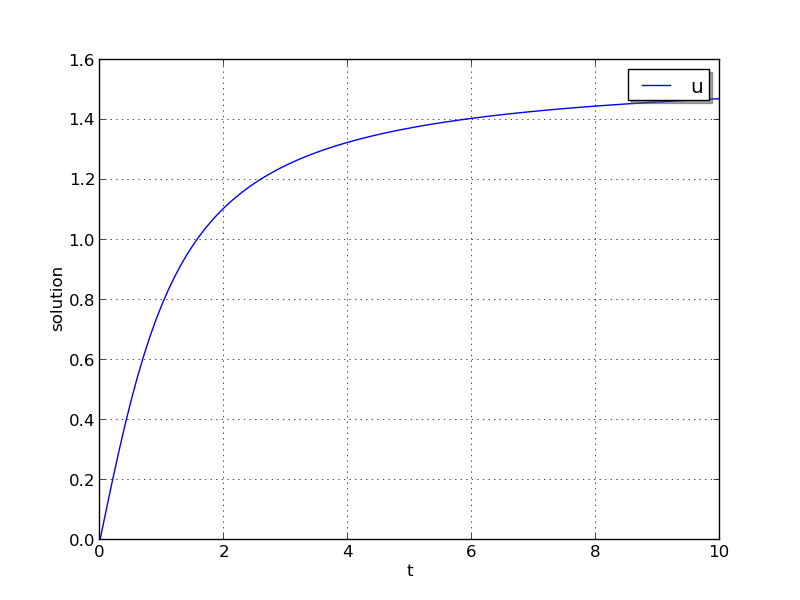
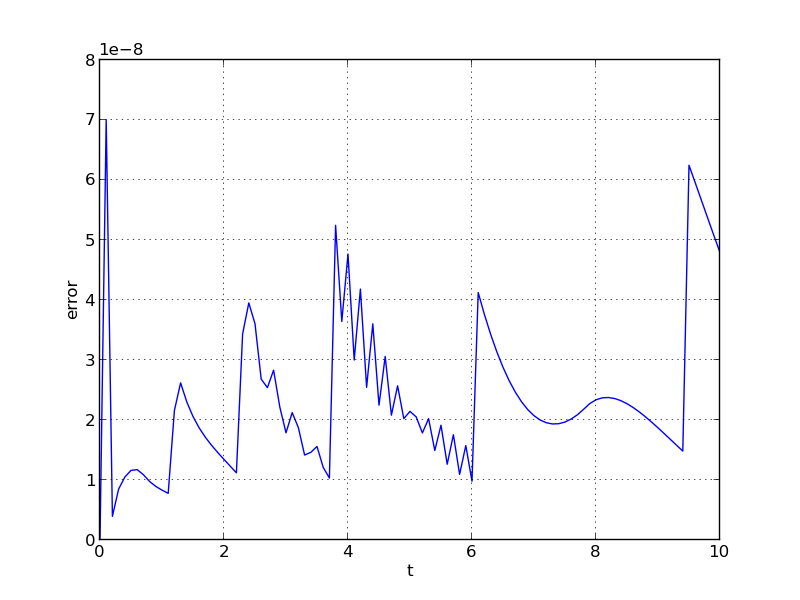
Solutions
This problem is included both as a simple example, but also because it has an analytical solution, \(y(t) = \arctan(t)\). As seen in the plots below, the computed solution tracks the analytical solution quite well (left), and results in errors below those specified by the input error tolerances (right).
ark_analytic_nonlin
This example problem is only marginally more difficult than the preceding problem, in that the ODE right-hand side function is nonlinear in the solution \(y\). While the implicit solver from the preceding problem would also work on this example, because it is not stiff we use this to demonstrate how to use ARKODE’s explicit solver interface. Although both the ARKStep and ERKStep time stepping modules are appropriate in this scenario, we use the ERKStep module here.
The ODE problem is
for the interval \(t \in [0.0, 10.0]\), with initial condition \(y(0)=0\). This has analytical solution \(y(t) = \log\left(\frac{t^2}{2} + t + 1\right)\).
Numerical method
This program solves the problem with the default ERK method. Output is printed every 1.0 units of time (10 total). Run statistics (optional outputs) are printed at the end.
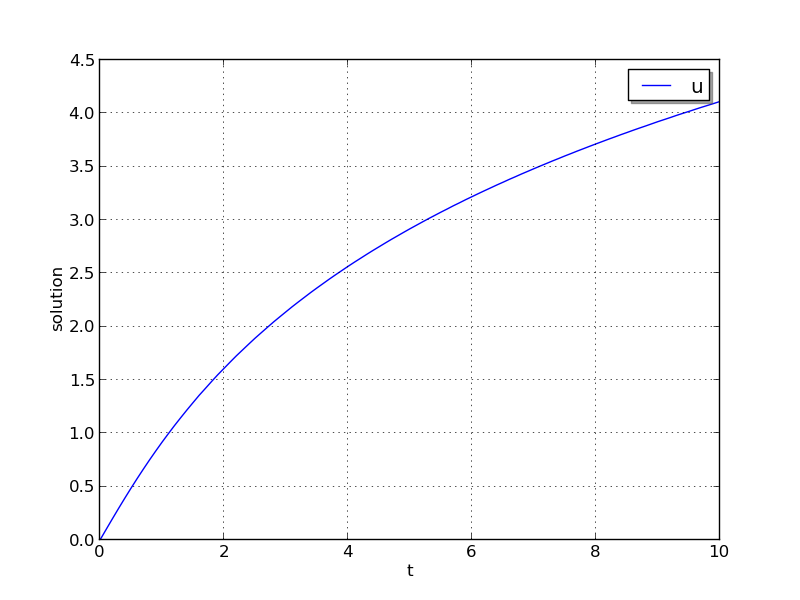
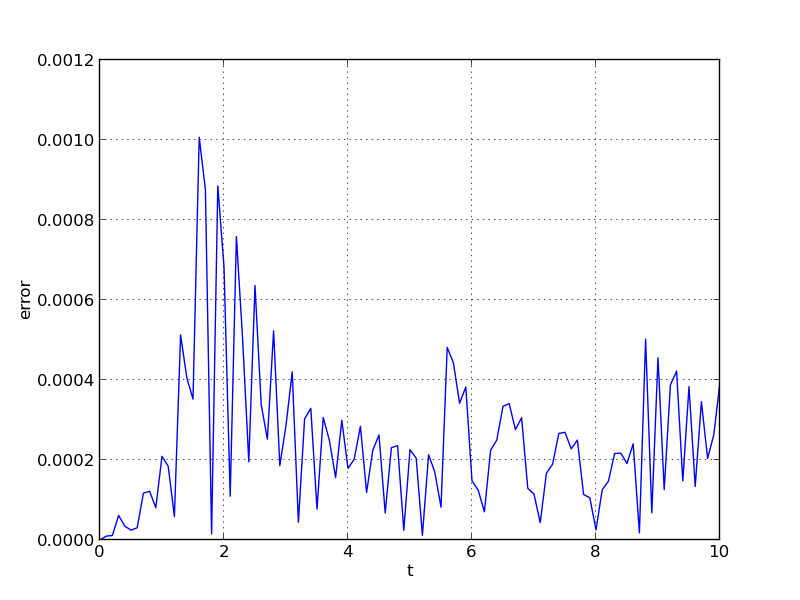
Solutions
As seen in the plots below, the computed solution tracks the analytical solution quite well (left), and results in errors comparable with those specified by the requested error tolerances (right).
ark_brusselator
We now wish to exercise the ARKODE solvers on more challenging nonlinear ODE systems. The following test simulates a brusselator problem from chemical kinetics, and is widely used as a standard benchmark problem for new solvers. The ODE system has 3 components, \(Y = [u,\, v,\, w]\), satisfying the equations,
We integrate over the interval \(0 \le t \le 10\), with the initial conditions \(u(0) = u_0\), \(v(0) = v_0\), \(w(0) = w_0\). After each unit time interval, the solution is output to the screen.
The problem implements 3 different testing scenarios:
Test 1: \(u_0=3.9\), \(v_0=1.1\), \(w_0=2.8\), \(a=1.2\), \(b=2.5\), and \(\varepsilon=10^{-5}\)
Test 2: \(u_0=1.2\), \(v_0=3.1\), \(w_0=3\), \(a=1\), \(b=3.5\), and \(\varepsilon=5\cdot10^{-6}\)
Test 3: \(u_0=3\), \(v_0=3\), \(w_0=3.5\), \(a=0.5\), \(b=3\), and \(\varepsilon=5\cdot10^{-4}\)
The example problem currently selects test 2, though that value may be easily adjusted to explore different testing scenarios.
Numerical method
This program solves the problem with the DIRK method, using a Newton iteration with the SUNLINSOL_DENSE linear solver module via the ARKDLS interface. Additionally, this example provides a routine to ARKDLS to compute the dense Jacobian.
The problem is run using scalar relative and absolute tolerances of \(rtol=10^{-6}\) and \(atol=10^{-10}\), respectively.
10 outputs are printed at equal intervals, and run statistics are printed at the end.
Solutions
The computed solutions will of course depend on which test is performed:
Test 1: Here, all three components exhibit a rapid transient change during the first 0.2 time units, followed by a slow and smooth evolution.
Test 2: Here, \(w\) experiences a fast initial transient, jumping 0.5 within a few steps. All values proceed smoothly until around \(t=6.5\), when both \(u\) and \(v\) undergo a sharp transition, with \(u\) increaseing from around 0.5 to 5 and \(v\) decreasing from around 6 to 1 in less than 0.5 time units. After this transition, both \(u\) and \(v\) continue to evolve somewhat rapidly for another 1.4 time units, and finish off smoothly.
Test 3: Here, all components undergo very rapid initial transients during the first 0.3 time units, and all then proceed very smoothly for the remainder of the simulation.
Unfortunately, there are no known analytical solutions to the
Brusselator problem, but the following results have been verified
in code comparisons against both CVODE and the built-in ODE solver
ode15s from Matlab:
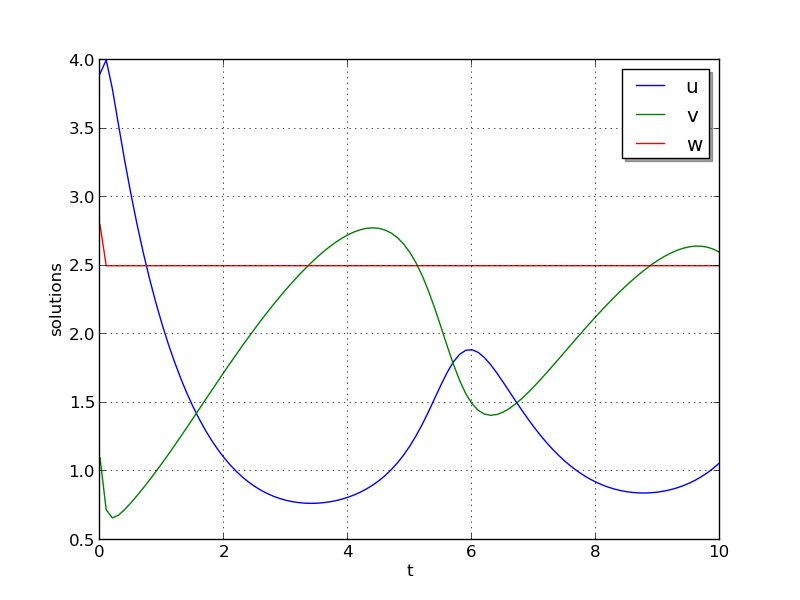
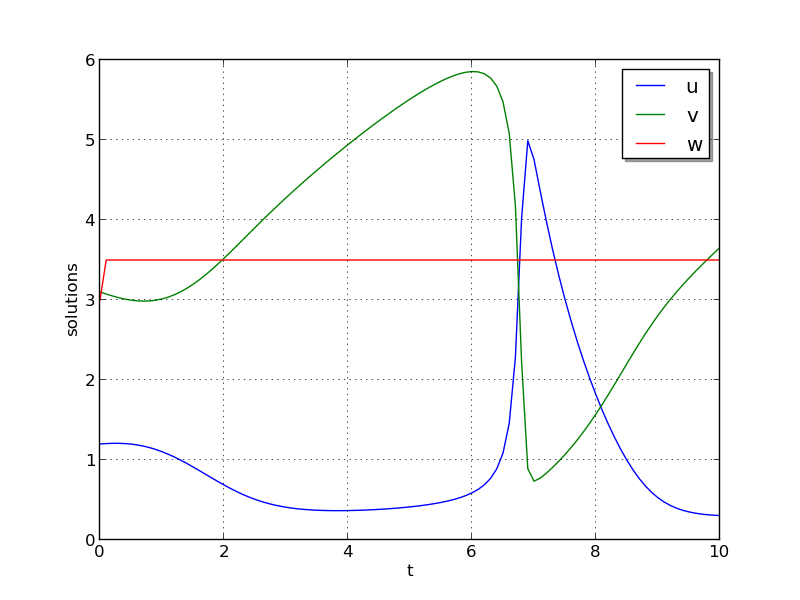
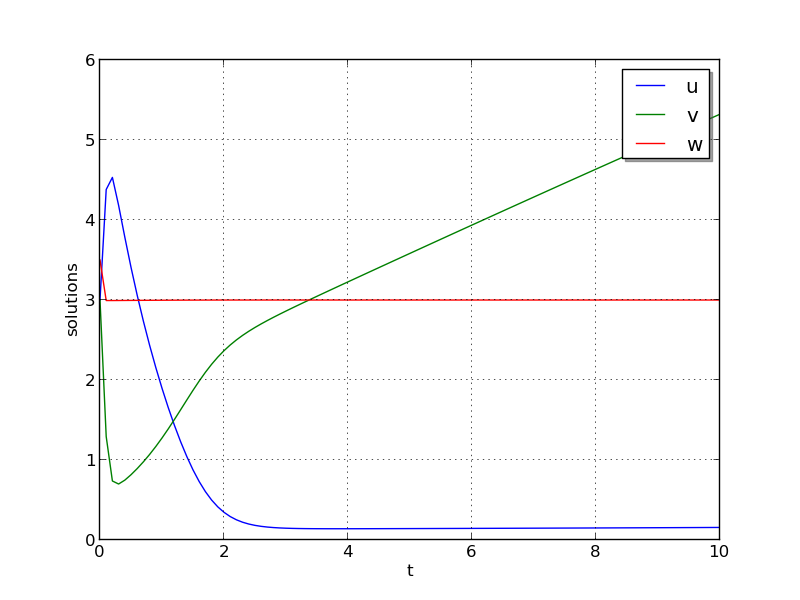
Brusselator solution plots: left is test 1, center is test 2, right is test 3.
ark_brusselator_fp
This test problem is a duplicate of the ark_brusselator problem
above, but with a few key changes in the methods used for time
integration and nonlinear solver. As with the previous test, this
problem has 3 dependent variables \(u\), \(v\) and \(w\),
that depend on the independent variable \(t\) via the IVP system
We integrate over the interval \(0 \le t \le 10\), with the initial conditions \(u(0) = u_0\), \(v(0) = v_0\), \(w(0) = w_0\). After each unit time interval, the solution is output to the screen.
Again, we have 3 different testing scenarios,
Test 1: \(u_0=3.9\), \(v_0=1.1\), \(w_0=2.8\), \(a=1.2\), \(b=2.5\), and \(\varepsilon=10^{-5}\)
Test 2: \(u_0=1.2\), \(v_0=3.1\), \(w_0=3\), \(a=1\), \(b=3.5\), and \(\varepsilon=5\cdot10^{-6}\)
Test 3: \(u_0=3\), \(v_0=3\), \(w_0=3.5\), \(a=0.5\), \(b=3\), and \(\varepsilon=5\cdot10^{-4}\)
with test 2 selected within in the example file.
Numerical method
This program solves the problem with the ARK method, in which we have split the right-hand side into stiff (\(f_i(t,y)\)) and non-stiff (\(f_e(t,y)\)) components,
Also unlike the previous test problem, we solve the resulting implicit
stages using the available accelerated fixed-point solver, enabled
through a call to ARKodeSetFixedPoint, with an acceleration
subspace of dimension 3.
10 outputs are printed at equal intervals, and run statistics are printed at the end.
ark_brusselator_mri
This test problem is a duplicate of the ark_brusselator problem
above, but using MRIStep with different parameters. As with the
previous test, this problem has 3 dependent variables \(u\), \(v\) and
\(w\), that depend on the independent variable \(t\) via the IVP system
We integrate over the interval \(0 \le t \le 2\), with the initial conditions \(u(0) = u_0\), \(v(0) = v_0\), \(w(0) = w_0\). The solution is output to the screen at equal intervals of 0.1 time units.
The problem implements the following testing scenario: \(u_0=1.2\), \(v_0=3.1\), \(w_0=3\), \(a=1\), \(b=3.5\), and \(\varepsilon=10^{-2}\)
Numerical method
This program solves the problem with the default third order method.
The problem is run using a fixed slow step size \(hs=0.025\) and fast step size \(0.001\).
20 outputs are printed at equal intervals, and run statistics are printed at the end.
ark_robertson
Our next two tests simulate the Robertson problem, corresponding to the kinetics of an autocatalytic reaction, corresponding to the CVODE example of the same name. This is an ODE system with 3 components, \(Y = [u,\, v,\, w]^T\), satisfying the equations,
We integrate over the interval \(0\le t\le 10^{11}\), with initial conditions \(Y(0) = [1,\, 0,\, 0]^T\).
Numerical method
This program is constructed to solve the problem with the DIRK solver. Implicit subsystems are solved using a Newton iteration with the SUNLINSOL_DENSE dense linear solver module via the ARKDLS interface; a routine is provided to ARKDLS to supply the Jacobian matrix.
The problem is run using scalar relative and absolute tolerances of \(rtol=10^{-4}\) and \(atol=10^{-11}\), respectively.
100 outputs are printed at equal intervals, and run statistics are printed at the end.
Solutions
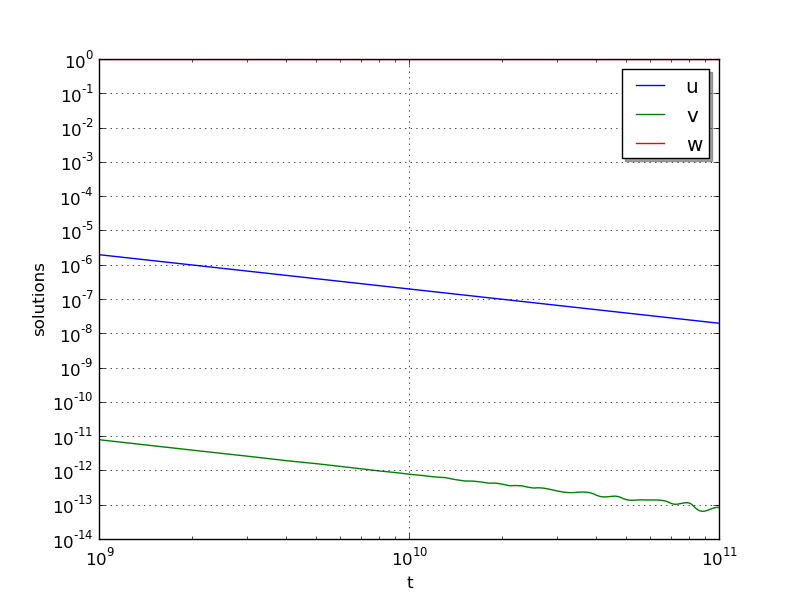
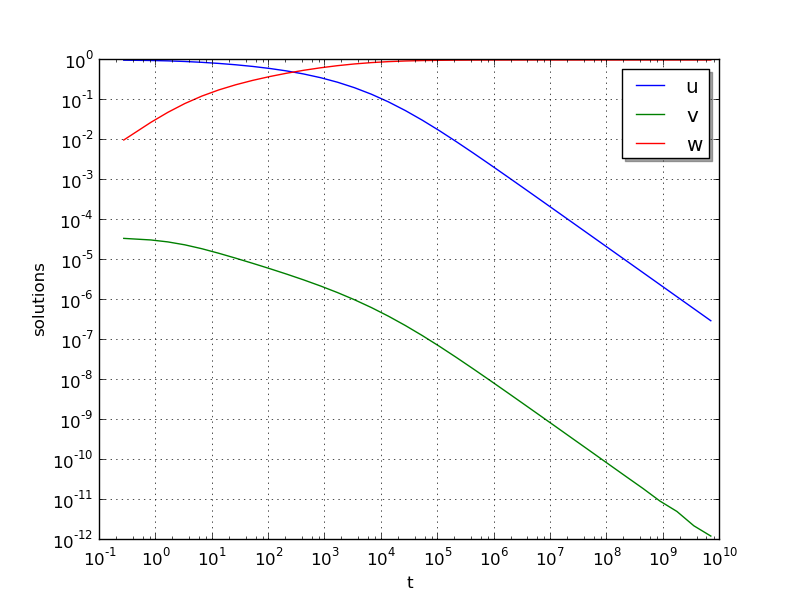
Due to the linearly-spaced requested output times in this example, and since we plot in a log-log scale, by the first output at \(t=10^9\), the solutions have already undergone a sharp transition from their initial values of \((u,v,w) = (1, 0, 0)\). For additional detail on the early evolution of this problem, see the following example, that requests logarithmically-spaced output times.
From the plot here, it is somewhat difficult to see the solution values for \(w\), which here all have a value of \(1 \pm 10^{-5}\). Additionally, we see that near the end of the evolution, the values for \(v\) begin to exhibit oscillations; this is due to the fact that by this point those values have fallen below their specified absolute tolerance. A smoother behavior (with an increase in time steps) may be obtained by reducing the absolute tolerance for that variable.
ark_robertson_root
We again test the Robertson problem, but in this example we will utilize both a logarithmically-spaced set of output times (to properly show the solution behavior), as well as ARKODE’s root-finding capabilities. Again, the Robertson problem consists of an ODE system with 3 components, \(Y = [u,\, v,\, w]^T\), satisfying the equations,
We integrate over the interval \(0\le t\le 10^{11}\), with initial conditions \(Y(0) = [1,\, 0,\, 0]^T\).
Additionally, we supply the following two root-finding equations:
While these are not inherently difficult nonlinear equations, they easily serve the purpose of determining the times at which our solutions attain desired target values.
Numerical method
This program solves the problem with the DIRK solver. Implicit subsystems are solved using a Newton iteration with the SUNLINSOL_DENSE linear solver module via the ARKDLS interface; a routine is supplied to provide the dense Jacobian matrix.
The problem is run using scalar relative and vector absolute tolerances. Here, we choose relative tolerance \(rtol=10^{-4}\), and set absolute tolerances on \(u\), \(v\) and \(w\) of \(10^{-8}\), \(10^{-11}\) and \(10^{-8}\), respectively.
100 outputs are printed at equal intervals, and run statistics are printed at the end.
However, unlike in the previous problem, while integrating the system, we use the rootfinding feature of ARKODE to find the times at which either \(u=10^{-4}\) or \(w=10^{-2}\).
Solutions
In the solutions below, we now see the early-time evolution of the solution components for the Robertson ODE system.
We note that when running this example, the root-finding capabilities
of ARKODE report outside of the typical logarithmically-spaced output
times to declare that at time \(t=0.264019\) the variable
\(w\) attains the value \(10^{-2}\), and that at time
\(t=2.07951\cdot10^{7}\) the variable \(u\) attains the value
\(10^{-4}\); both of our thresholds specified by the root-finding
function g().
ark_brusselator1D
We now investigate a time-dependent system of partial differential equations. We adapt the previously-described brusselator test problem by adding diffusion into the chemical reaction network. We again have a system with 3 components, \(Y = [u,\, v,\, w]^T\) that satisfy the equations,
However, now these solutions are also spatially dependent. We integrate for \(t \in [0, 10]\), and \(x \in [0, 1]\), with initial conditions
and with stationary boundary conditions, i.e.
We note that these can also be implemented as Dirichlet boundary conditions with values identical to the initial conditions.
Numerical method
We employ a method of lines approach, wherein we first semi-discretize in space to convert the system of 3 PDEs into a larger system of ODEs. To this end, the spatial derivatives are computed using second-order centered differences, with the data distributed over \(N\) points on a uniform spatial grid. As a result, ARKODE approaches the problem as one involving \(3N\) coupled ODEs.
The problem is run using \(N=201\) spatial points, with parameters \(a=0.6\), \(b=2.0\), \(d_u=0.025\), \(d_v=0.025\), \(d_w=0.025\) and \(\varepsilon=10^{-5}\). We specify scalar relative and absolute solver tolerances of \(rtol=10^{-6}\) and \(atol=10^{-10}\), respectively.
This program solves the problem with a DIRK method, using a Newton iteration with the SUNLINSOL_BAND linear solver module via the ARKDLS interface; a routine is supplied to fill the banded Jacobian matrix.
100 outputs are printed at equal intervals, and run statistics are printed at the end.
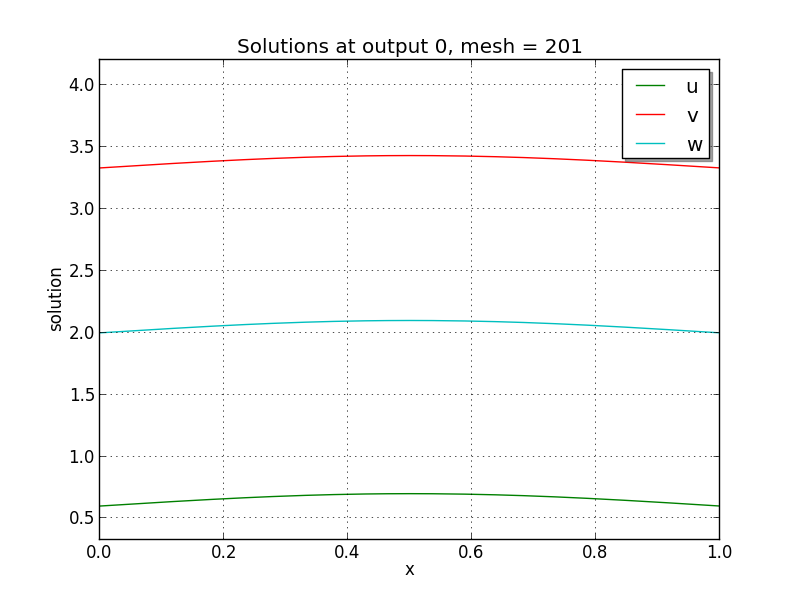
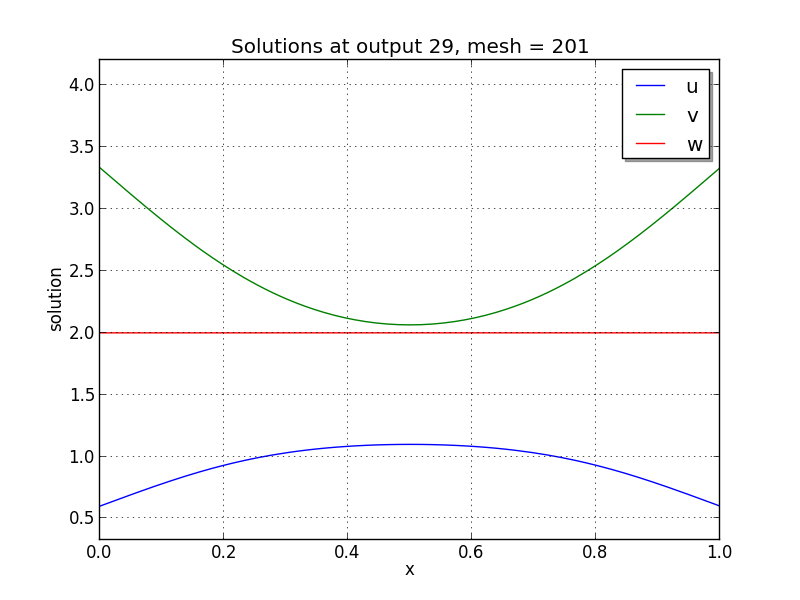
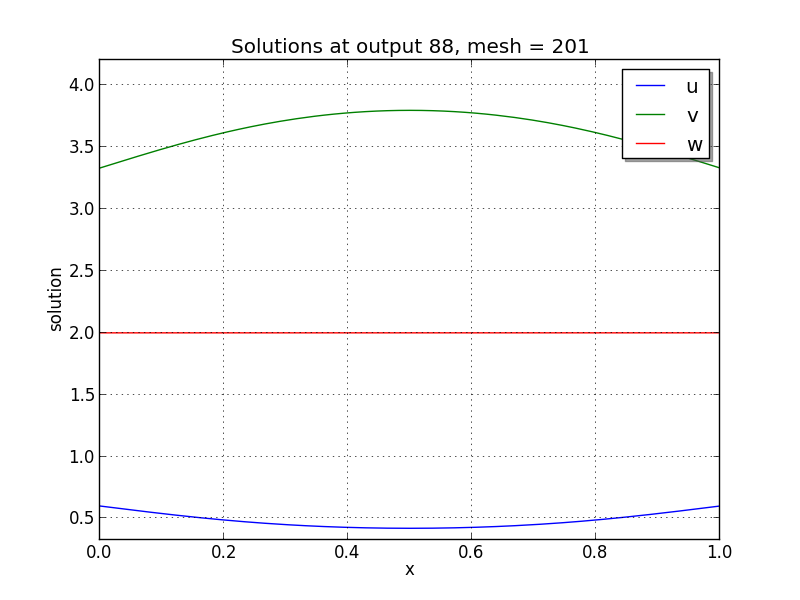
Solutions
Brusselator PDE solution snapshots: left is at time \(t=0\), center is at time \(t=2.9\), right is at time \(t=8.8\).
ark_brusselator1D_klu
This problem is mathematically identical to the preceding problem, ark_brusselator1D, but instead of using the SUNMATRIX_BAND banded matrix module and SUNLINSOL_BAND linear solver module, it uses the SUNMATRIX_SPARSE sparse matrix module with the SUNLINSOL_KLU linear solver module. These are still provided to ARKODE using the ARKDLS direct linear solver interface, and again a routine is provided to supply a compressed-sparse-column version of the Jacobian matrix. Additionally, the solution is only output 10 times instead of 100.
ark_brusselator1D_FEM_slu
This problem is mathematically identical to the preceding problems, ark_brusselator1D and ark_brusselator1D_klu, but utilizes a different set of numerical methods.
Numerical method
As with the preceding problems, we employ a method of lines approach, wherein we first semi-discretize in space to convert the system of 3 PDEs into a larger system of ODEs. However, in this example we discretize in space using a standard piecewise linear, Galerkin finite element method, over a non-uniform discretization of the interval \([0,1]\) into 100 subintervals. To this end, we must integrate each term in each equation, multiplied by test functions, over each subinterval, e.g.
Since we employ piecewise linear basis and trial functions, the highest nonlinearity in the model is a quartic polynomial. We therefore approximate these integrals using a three-node Gaussian quadrature, exact for polynomials up to degree six.
After this spatial semi-discretization, the system of three PDEs is passed to ARKODE as a system of \(3N\) coupled ODEs, as with the preceding problem.
As with the preceding problem ark_brusselator1D_klu, this example solves the problem with a DIRK method, using a Newton iteration, and the SUNMATRIX_SPARSE module. However, this example uses the SUNLINSOL_SUPERLUMT linear solver module, both for the Newton systems having Jacobian \(A=M-\gamma J\), as well as for the mass-matrix-only linear systems with matrix \(M\). Functions implementing both \(J\) and \(M\) in compressed-sparse-column format are supplied.
100 outputs are printed at equal intervals, and run statistics are printed at the end.
Solutions
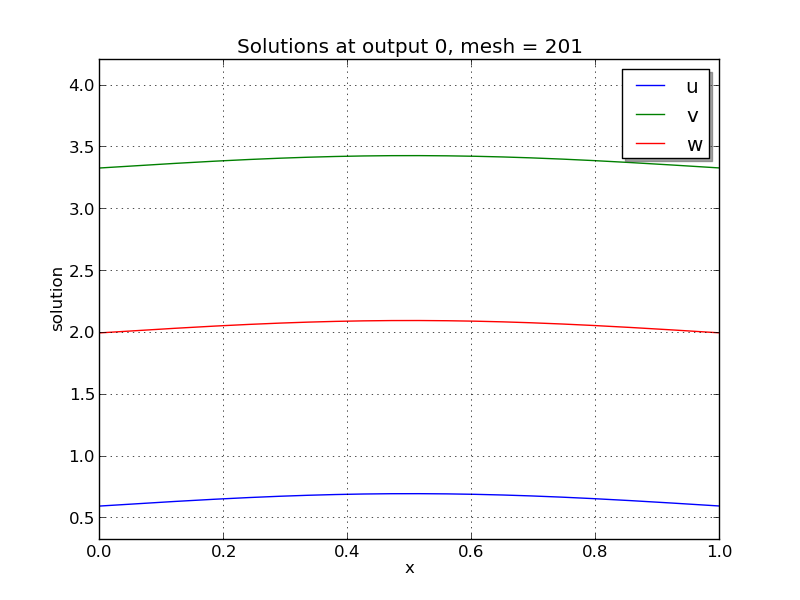
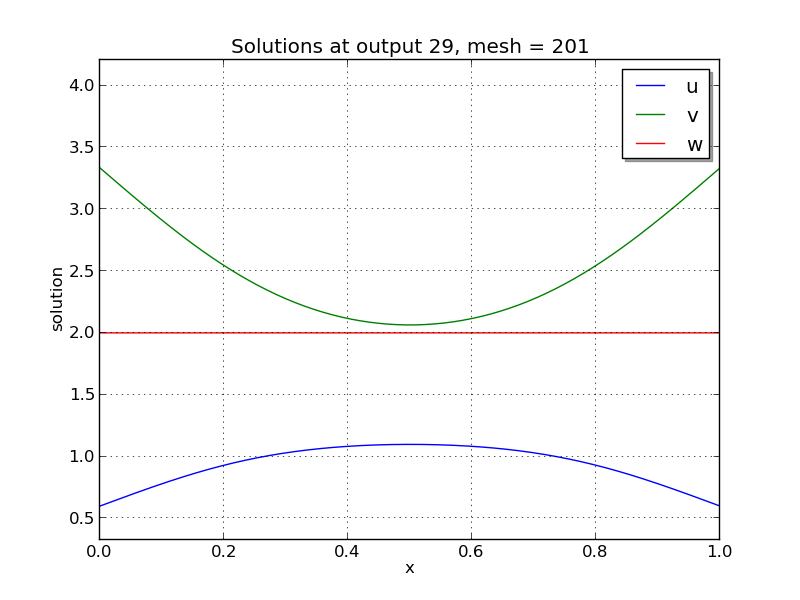
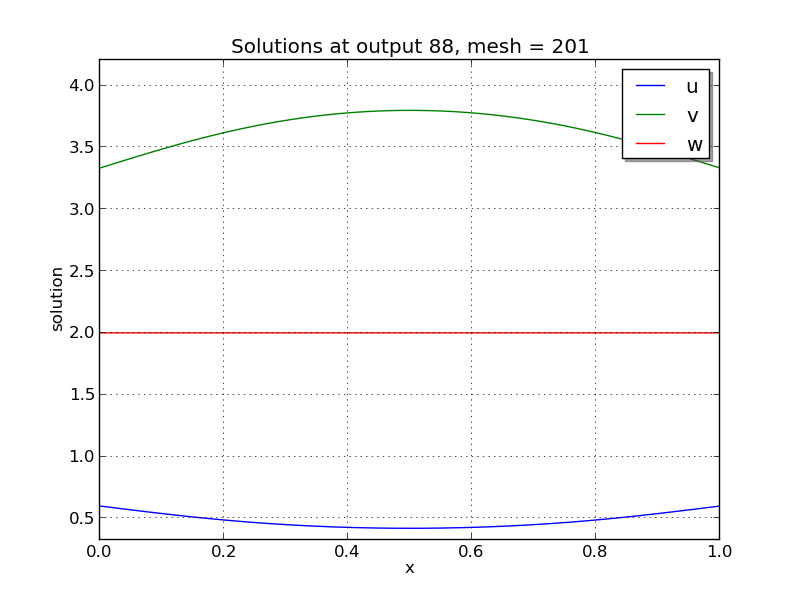
Finite-element Brusselator PDE solution snapshots (created using the
supplied Python script, plot_brusselator1D_FEM.py): left is at time
\(t=0\), center is at time \(t=2.9\), right is at time
\(t=8.8\).
ark_heat1D
As with the previous brusselator problem, this example simulates a simple one-dimensional partial differential equation; in this case we consider the heat equation,
for \(t \in [0, 10]\), and \(x \in [0, 1]\), with initial condition \(u(0,x) = 0\), stationary boundary conditions,
and a point-source heating term,
Numerical method
As with the ark_brusselator1D test problem, this test computes spatial derivatives using second-order centered differences, with the data distributed over \(N\) points on a uniform spatial grid.
In this example, we use \(N=201\) spatial points, with heat conductivity parameter \(k=0.5\), and discretize the equation using second-order centered finite-differences. The problem is run using scalar relative and absolute solver tolerances of \(rtol=10^{-6}\) and \(atol=10^{-10}\), respectively.
This program solves the problem with a DIRK method, utilizing a Newton iteration. The primary utility in including this example is that since the Newton linear systems are now symmetric, we solve these using the SUNLINSOL_PCG iterative linear solver, through the ARKSPILS linear solver interface. A routine to perform the Jacobian-vector product routine is supplied, in order to provide an example of its use.
Solutions
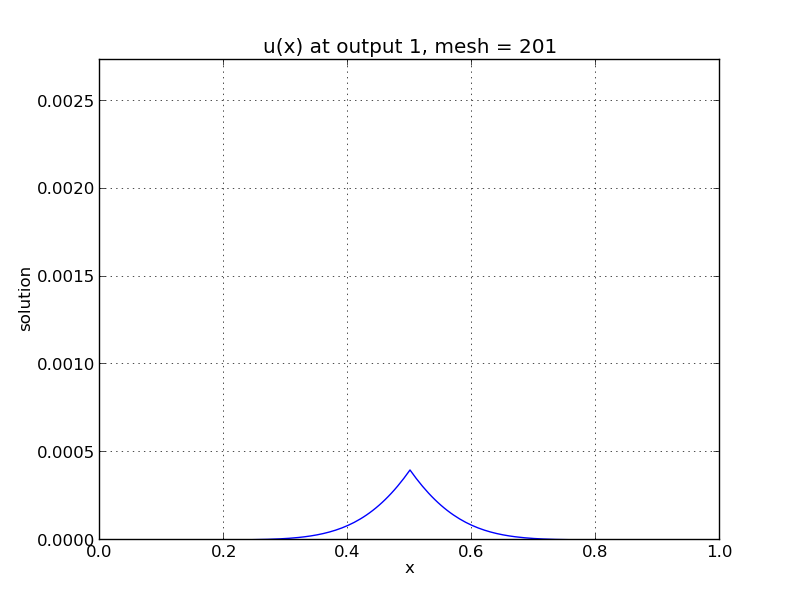
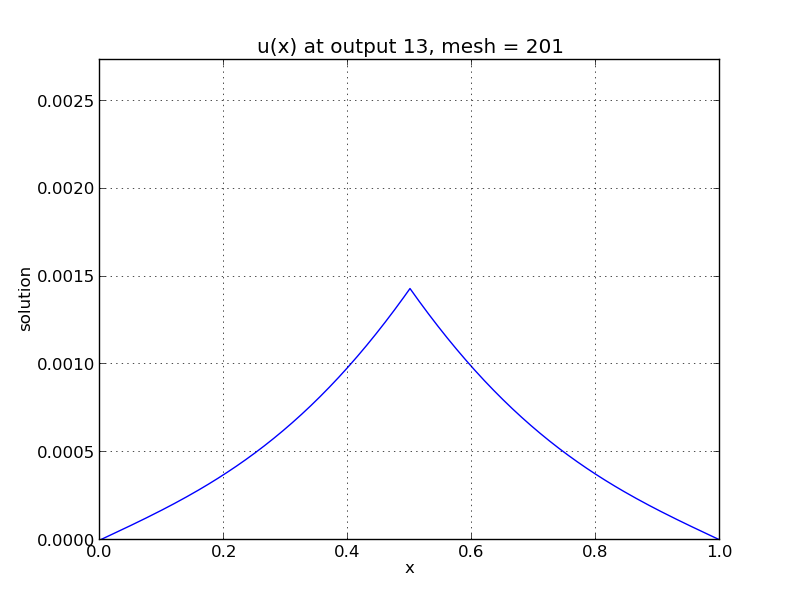
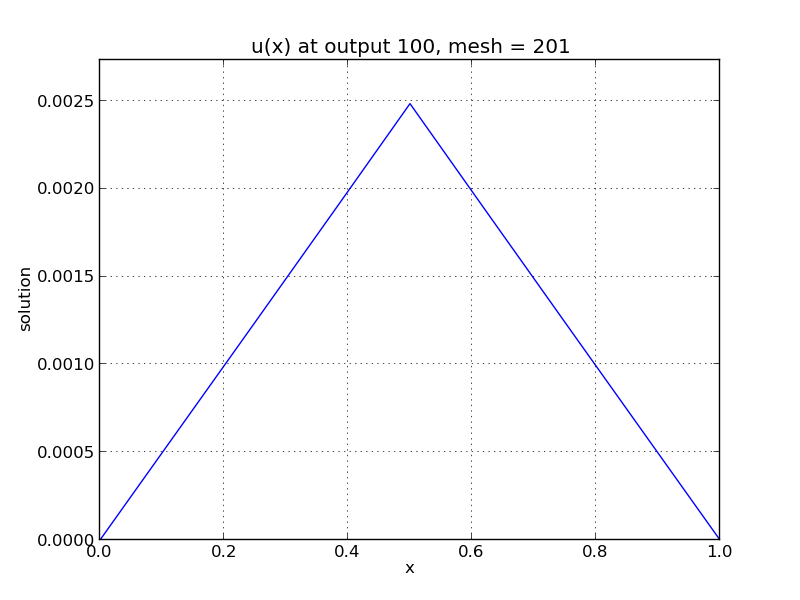
One-dimensional heat PDE solution snapshots: left is at time \(t=0.01\), center is at time \(t=0.13\), right is at time \(t=1.0\).
ark_heat1D_adapt
This problem is mathematically identical to the ark_heat1D test problem. However, instead of using a uniform spatial grid, this test problem utilizes a dynamically-evolving spatial mesh. The PDE under consideration is a simple one-dimensional heat equation,
for \(t \in [0, 10]\), and \(x \in [0, 1]\), with initial condition \(u(0,x) = 0\), stationary boundary conditions,
and a point-source heating term,
Numerical method
We again employ a method-of-lines discretization approach. The spatial derivatives are computed using a three-point centered stencil, that is accurate to \(O(\Delta x_i^2)\) if the neighboring points are equidistant from the central point, i.e. \(x_{i+1} - x_i = x_i - x_{i-1}\); however, if these neighbor distances are unequal the approximation reduces to first-order accuracy. The spatial mesh is initially distributed uniformly over 21 points in \([0,1]\), but as the simulation proceeds the mesh is [crudely] adapted to add points to the center of subintervals bordering any node where \(\left|\frac{\partial^2 u}{\partial x^2}\right| > 0.003\). We note that the spatial adaptivity approach employed in this example is ad-hoc, designed only to exemplify ARKODE usage on a problem with varying size (not to show optimally-adaptive spatial refinement methods).
This program solves the problem with a DIRK method, utilizing a Newton
iteration and the SUNLINSOL_PCG iterative linear solver.
Additionally, the test problem utilizes ARKODE’s spatial adaptivity
support (via ARKodeResize), allowing retention of the
major ARKODE data structures across vector length changes.
ark_KrylovDemo_prec
This problem is an ARKODE clone of the CVODE problem,
cv_KrylovDemo_prec. This is a demonstration program using the
SUNLINSOL_SPGMR linear solver module. As explained more thoroughly in
[84], the problem is a stiff ODE system that arises from a
system of PDEs modeling a six-species food web population model, with
predator-prey interaction and diffusion on the unit square in two
dimensions. We have a system with 6 components, \(C = [c^1,\,
c^2,\,\ldots, c^6]^T\) that satisfy the equations,
where
Here, the first three species are prey and the last three are predators. The coefficients \(a_{i,j}, b_i, d_i\) are:
The spatial domain is \((x,y) \in [0, 1]^2\); the time domain is \(t \in [0,10]\), with initial conditions
and with homogeneous Neumann boundary conditions, \(\nabla c^i \cdot \vec{n} = 0\).
Numerical method
We employ a method of lines approach, wherein we first semi-discretize in space to convert the system of 6 PDEs into a larger system of ODEs. To this end, the spatial derivatives are computed using second-order centered differences, with the data distributed over \(Mx*My\) points on a uniform spatial grid. As a result, ARKODE approaches the problem as one involving \(6*Mx*My\) coupled ODEs.
This program solves the problem with a DIRK method, using a Newton iteration with the preconditioned SUNLINSOL_SPGMR iterative linear solver module, and ARKSPILS interface. The preconditioner matrix used is the product of two matrices:
A matrix, only defined implicitly, based on a fixed number of Gauss-Seidel iterations using the diffusion terms only.
A block-diagonal matrix based on the partial derivatives of the interaction terms \(f\) only, using block-grouping (computing only a subset of the \(3\times3\) blocks).
Four different runs are made for this problem. The product
preconditioner is applied on the left and on the right. In each case,
both the modified and classical Gram-Schmidt orthogonalization options
are tested. In the series of runs, ARKodeInit, SUNSPGMR,
ARKSpilsSetLinearSolver, SUNSPGMRSetGSType,
ARKSpilsSetEpsLin and ARKSpilsSetPreconditioner are called
only for the first run, whereas ARKodeReInit,
SUNSPGMRSetPrecType and SUNSPGMRSetGSType are called to
re-initialize the integrator and update linear solver parameters for
each of the remaining three runs.
A problem description, performance statistics at selected output times, and final statistics are written to standard output. On the first run, solution values are also printed at output times. Error and warning messages are written to standard error, but there should be no such messages.
ark_onewaycouple_mri
This example simulates a linear system of 3 dependent variables \(u\), \(v\) and \(w\), that depend on the independent variable \(t\) via the IVP system
We integrate over the interval \(0 \le t \le 1\), with the initial conditions \(u(0) = 1\), \(v(0) = 0\), \(w(0)= 2\). The solution is output to the screen at equal intervals of 0.1 time units.
Numerical method
This program solves the problem with the default third order method.
The problem is run using a fixed slow step size \(hs=0.001\) and fast step size \(0.0001\).
10 outputs are printed at equal intervals, and run statistics are printed at the end.
Solutions
This system has the analytic solution,
ark_twowaycouple_mri
This example simulates a linear system of 3 dependent variables \(u\), \(v\) and \(w\), that depend on the independent variable \(t\) via the IVP system
We integrate over the interval \(0 \le t \le 2\), with the initial conditions \(u(0) = 9001/10001\), \(v(0) = 10^{-5}/10001\), \(w(0)= 1000\). The solution is output to the screen at equal intervals of 0.1 time units.
Numerical method
This program solves the problem with the default third order method.
The problem is run using a fixed slow step size \(hs=0.001\) and fast step size \(0.00002\).
20 outputs are printed at equal intervals, and run statistics are printed at the end.